Das beste Radarsystem der Welt für die jeweilige Anwendung entwickeln zu wollen, ist ein ambitioniertes Ziel. Genau daran aGenau daran arbeiten Dr. Christian Tschoban vom Fraunhofer IZM und Paul Perlwitz von der TU Berlin. Die beiden Wissenschaftler haben einen Radarbaukasten für 24, 60 und 79 GHz-Anwendungen mit 0,1 bis 260 Metern Reichweite und einer Auflösung <5° entwickelt.
Mit Superlativen ist das so eine Sache… Sie lassen einen aufhorchen. In meinem Kalender steht donnerstags ein fester Termin: Online-Seminar „Aufbau- und Verbindungstechnik“. Es ist eine interne Veranstaltungsreihe, durchgeführt vom Fraunhofer IZM und der TU Berlin. Vor zwei Monaten präsentierten Christian Tschoban und Paul Perlwitz, aus der Abteilung Radar Frontends & Smart Sensor Systems, dort die „Entwicklung eines Radarbaukastens als Ausgangspunkt für Technologieprojekte“ und machten genau jene Aussage.
Das war Ansporn für mich, die beiden IZM-Wissenschaftler zu interviewen, um endlich den Fragen auf den Grund zu gehen: Was genau meinen die Radarexperten des Fraunhofer IZM, wenn sie von ihrem Baukasten sprechen? Welche Vorteile und Alleinstellungsmerkmale bietet er? Für welche Radaranwendungen ist er interessant? Und letztendlich ist es auch eine gute Gelegenheit, ihre Zielsetzung – die Entwicklung des weltbesten Radarsystems für die jeweilige Anwendung – zu erörtern.
Ich will an dieser Stelle nicht verheimlichen, dass ich mich persönlich bisher mit dem englischen Begriff „Radar Toolbox“ etwas schwergetan habe. Daher war eine meiner ersten Fragen an Christian Tschoban und Paul Perlwitz, den Begriff „Toolbox“ im Kontext von Radarsensoren einzuordnen.
Radarentwicklung nach dem Lego-Prinzip
Mein Missverständnis ist schnell geklärt. Ins Deutsche übertragen ist nicht der Begriff „Werkzeugkoffer“ sondern „Baukasten“ gemeint. Mit letzterem verbinden die meisten von uns, das Bild von Bausteinen und Konstruktionsspielzeug aus Holz, Metall oder Kunststoff. Wenn Tschoban und Perlwitz von einem Baukastensystem sprechen, beziehen sie sich auf das sogenannte Lego-Prinzip. Statt jedes Mal bei einem Forschungsprojekt von Grund auf neue Radar-Module zu entwickeln, nutzt das Team die Vorteile des modularen Bauens und optimiert verschiedene Bestandteile für die jeweilige Anwendung weiter.
Serielles und modulares Bauen ist schnell, kostengünstig und zugleich qualitätvoll. Statt beispielsweise Neubauten als Unikat zu planen, orientiert sich die Wohnungswirtschaft bei der seriellen Bauweise an industriellen Herstellungsprozessen aus der Automobilindustrie. Autohersteller verwenden seit Langem für verschiedene Autos die gleiche Plattform. Voraussetzung für die Planung – sei es ein Systemhaus oder ein Fahrzeugmodul – ist, die notwendigen Module zunächst als Prototypen zu entwerfen, um sie später in Serie fertigen zu können.
Dieses Lego-Prinzip auch bei der Entwicklung von Radaren anzuwenden, hat Johannes Sommer 2016 in seiner Masterarbeit skizziert. Diese Idee haben Tschoban und Perlwitz aufgegriffen und unter der Federführung der TU Berlin 2017 erstmals in dem ZIM-Projekt „Railways“ mit zwei Anwendungsbereichen: High Performance und Low Energy erstmals umgesetzt. „Bei dem Projekt kamen Radarsensoren mit zwei verschiedenen Frequenzbereichen zum Einsatz. Die Verarbeitung sollte jedoch auf einem gemeinsamen Mainboard stattfinden, so dass mehrere Projektpartner die Daten auslesen, ansteuern und weiterverarbeiten können“, erläutert Paul Perlwitz. „Wir haben sehr schnell die Vorteile dieses Ansatzes erkannt und uns in nachfolgenden Projekten zunutze gemacht.“
Das Zauberwort heißt Standardisierung. Statt immer wieder Antworten auf die wiederkehrenden Fragen zu suchen: Welchen Prozessor nehmen wir? Wie setzen wir die Ansteuerung der HF-Komponenten um? Wie schreiben wir die Software? Wie bauen wir die Leiterplatten und deren Design auf? setzen die Wissenschaftler*innen konsequent bestimmte Prozessschritte, ausgewählte Module und Baugruppen einheitlich um.
„Die Zeitersparnis ist enorm, wenn man entweder die gesamte Radar-Plattform oder auch nur Teile davon bei neuen Projekten verwendet. Wir sparen Ressourcen ein. Zugleich müssen wir deutlich weniger Tests durchführen, da wir die Gewissheit haben, dass unsere Module funktionieren“, führt Perlwitz aus.
Universelle Radar-Plattform: Ready-to-Plug & Play
„Die Stärke unserer Radar-Plattform ist ihre universelle Architektur. Sie ist Ready-to Plug&Play für vielfältigste Anwendungen und Technologien“, ergänzt Christian Tschoban stolz. „Über einen Zeitraum von fünf Jahren haben wir eine universelle Plattform erschaffen, auf der Interface-Module, Radar-Module bis hin zum Mainboard fehlerfrei für unterschiedlichste 24 und 60 GHz-Anwendungen ausgewechselt werden können.“
Der Baukasten basiert auf verschiedenen Radar-Prinzipien, Hardware-Designs und Software-Blöcken. Diese Bausteine können wahlweise zusammengestellt und je nach Projekt weiterentwickelt werden. „Derzeit arbeiten wir daran, den Baukasten für 79 GHz-Anwendungen zu erweitern“, ergänzt Tschoban. Das Interesse an dem IZM-Radar-Portfolio ist groß. Andere Forschungseinrichtungen und auch Hersteller stehen bereits mit dem Fraunhofer IZM dazu im Kontakt.
Exkurs – Entwicklungsstufen des Radar-Baukastens
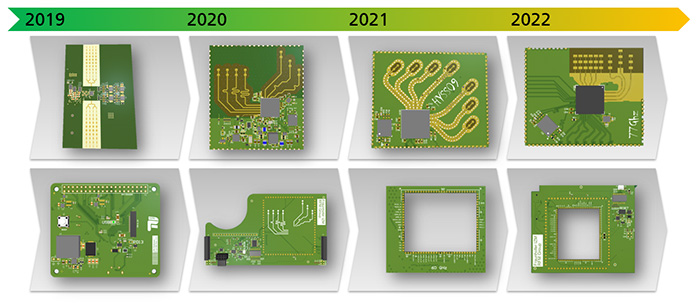
2017 – 2020 ZIM-Projekt RAILWAYS
In diesem Projekt ging es um die Entwicklung einer Radarplattform für Anwendungen im Bereich des Schienengüter- und Personenverkehrs. Dabei wurde zusammen mit internationalen Partnern aus dem Bahnbereich eine umfangreiche Entwicklung vorangetrieben, die auf Seiten der TU Berlin die Entwicklung einer Systemplattform und zweier Radarmodule (24 sowie 60 GHz) beinhaltete.
Aufbauend auf dieser Arbeit wurde auf Eigeninitiative die Weiterentwicklung der 60-GHz-Platine und des Mainboards zu einer Raspberry-Pi-kompatiblen Plattform vorangetrieben, das einen direkten Betrieb mit dem Raspberry Pi und damit eine vereinfachte Datenauswertung ermöglicht.
2019 – 2022 Projekt DAYSI
Zur kommunikativen Unterstützung bei der Betreuung von demenziell erkrankten Menschen war das Fraunhofer IZM an der Entwicklung eines interaktiven Tisches beteiligt, der mit Radar- und Kommunikationstechnologie ausgestattet ist. Ein Ziel war die Entwicklung eines 60 GHz Radar-Frontend-Systems, das Patient*innen die Möglichkeit bietet, ein auf die Tischoberfläche projiziertes Spiel ausschließlich durch Gestik zu steuern.
- Verwendung von kompatiblen Teilen (Antennen/PDN/Datenverarbeitung) des bereits vorhandenen Moduls
- Entwicklung neuer, an die Anforderungen angepasster Antennen
- Hardware für Schnittstellen zum kontaktlosen Laden
- Integration von mm-Wellen Substraten für die 60 GHz WLAN-Schnittstellen
- 60 GHz Radar-Frontend-System für die Gestensteuerung
- Bluetooth-Modul und RFID-Schnittstelle

2019 – 2022 Projekt OmniConnect
Im BMBF-Projekt OmniConnect stand die Vernetzung von Objekten in Innenräumen mittels Radarstrahlen und passiver Tags im Fokus. Auch sich bewegende Gegenstände oder gar Personen lassen sich in geschlossenen Räumen orten. Zudem können zusätzlich zur Angabe der Position und Bewegung weitere Informationen über das Objekt übermittelt und folglich vernetzt werden.
Die hochintegrierten Systeme arbeiten mit Frequenzen im 60-GHz-Band, sind nur 25 Quadratzentimeter groß, für den Menschen ungefährlich – zudem benötigen die passiven Tags keine eigene Stromversorgung. Die Technik ist für den Einsatz im Pflegebereich geeignet, beispielsweise um Gefahren von sturzgefährdeten Menschen abzuwenden.
- Radarsensor zur Bewegungserkennung und Personen-/Objektidentifikation über passive Radar-Tags
- Aktualisierung des Radarbausatzes mit neuen Untergruppen, Komponenten und Stromversorgung sowie neuer Formfaktor (Systemplatine mit 4 Radarmodulen)
- Integration des 60-GHz-Radarsystems in Alltagsgegenstand (Deckenlampe)
- Datenverarbeitung über FPGA

2022 – 2024 Projekt AKIRA-UTM
Im Rahmen dieses Projekts entwickeln die beteiligten Projektpartner ein Konzept für eine bodengestützte Radarplattform, um automatisiert fliegende Drohnen bis zu einer Flughöhe von 100 Metern zuverlässig und permanent zu orten. Das Fraunhofer IZM arbeitet an der Realisierung der folgenden Innovationen:
- 3D-Strukturierungstechnologie für 3D-MIMO-Antennen
- Kalibrierung von 2 bis 3 Radarsensoren auf einer Drohne für eine 360°-Rundumsicht
- Radar-MIMO-Architektur für einen Umkreis von bis 500 m
Mehr Informationen im Datenblatt AKIRA-UTM
Sichere Drohnenflüge über deutschen Metropolen
Ein Problem besteht oftmals aus mehreren Einzelteilen
Während unseres Gesprächs betonen die beiden Forscher immer wieder die Wichtigkeit, die Funktionsweise der verwendeten Chips, Platinen und der digitalen Signalverarbeitung zu verstehen, zu dokumentieren und zu gewährleisten. Viele Radar-Chips verfügen nur über ein Signal-Frontend. D.h. um diese bedienen zu können, müssen zusätzlich noch ein Mikrocontroller und ein FGPA-Prozessor ergänzt werden. „Es gibt derzeit nur wenige Hersteller, der einen Chip mit vollständiger Signalverarbeitung anbieten“, erläutert Tschoban. Der Vorteil ist: Hat man diesen Chip verstanden, kann man sehr schnell und einfach Radarsysteme aufbauen.
Tschoban und Perlwitz kennen diesen Chip mittlerweile in- und auswendig. Sie sind sogar noch einen Schritt weitergegangen. „Wir haben unsere Radar-Antennen so designt, dass sie nicht auf einen bestimmten Chip optimiert sind. Das heißt, mit unserer universellen Plattform ist es (theoretisch) auch möglich, den Chip auszutauschen.“ Dank der einheitlichen Schnittstellen kommen die Vorteile des Lego-Prinzips bei dem Radarbaukasten voll zur Entfaltung. Ein Element lässt sich ohne Funktionseinbußen austauschen.
„Wenn Du eine Sache änderst, können nachfolgende Probleme nur an dieser einen Sache liegen. Diese schrittweise Vorgehensweise hilft uns ungemein bei der Suche nach möglichen Fehlerquellen. Wir suchen nicht mehr wie in der Anfangsphase nach der Stecknadel im Heuhaufen.“ Zu Beginn waren die Forschenden mit einem Meer an Problemen konfrontiert:
- Warum funktionieren die Antennen nicht?
- Wieso lässt sich der mmIC nicht ansprechen?
- Weshalb streikt die Software?
Statt wie früher 20 Bausteine gleichzeitig zu verändern, konzentriert sich das Team jetzt auf die Anpassung von maximal einem bis zwei Elementen pro Projekt. So haben die IZM-Forscher mehr Zeit und Spielraum, die Software- und Hardwarekomponenten für die Anwendungen anzupassen.
„Von unseren Erfahrungen und von dieser Vorgehensweise profitieren unsere Auftraggeber“, so Perlwitz. „Gleich zu Projektstart können wir unseren Partnern Testmodule zur Verfügung stellen. Anhand dieser können sie erste Anwendungen demonstrieren und optimieren.“ Während der Kunde erste Tests durchführt und prüft, wie die Radar-Plattform in sein jeweiliges System eingebettet werden kann, passen die Forscher am Fraunhofer IZM die Module, Schnittstellen, Antennen und Leistungen an. In dieser parallelen Arbeitsweise liegt eine weitere Win-Win-Situation.
Die Entwicklung des Radarbaukastens ist längst nicht abgeschlossen. In einem nächsten Schritt plant das Team, die Radar-Module noch kleiner und leistungsstärker zu entwickeln und neue Anwendung adressieren zu können.
Gut, besser, am besten: Neuartige Radar-Antennen und innovative Packaging-Konzepte
Um die Bauteile im Package so kompakt wie möglich zu machen und in neue Bereiche der Technologie überführen zu können, arbeiten die IZM-Forscher kontinuierlich an der Radar-Plattform weiter. Dazu weiter unten im Text mehr.
Auf die Frage, wie ihnen das gelingt und wo sie an physikalische Grenzen stoßen, erläutern Tschoban und Perlwitz: „Die Größe der Platine wird maßgeblich durch die Antennen und deren Abstände beeinflusst. Die Antennengröße wiederum ist auf eine bestimmte Wellenlänge angepasst z.B. 60 GHz. Der Abstand zwischen den Antennen muss genau dieser Wellenlänge entsprechen.“
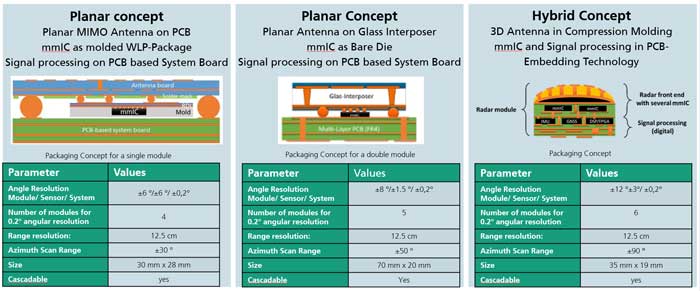
Es gibt mehrere Möglichkeiten, Antennen zu minimieren. So ist es möglich, auf ein oder zwei Antennen zu verzichten, wenn man die Auflösung verringert. Eine weitere Alternative ist, die Frequenz auf 77 GHz und darüber hinaus zu erhöhen. Im Ergebnis könnten so kleinere Antennen zum Einsatz kommen, die zusammen wesentlich weniger Platz einnehmen als bei niedrigeren Frequenzen.
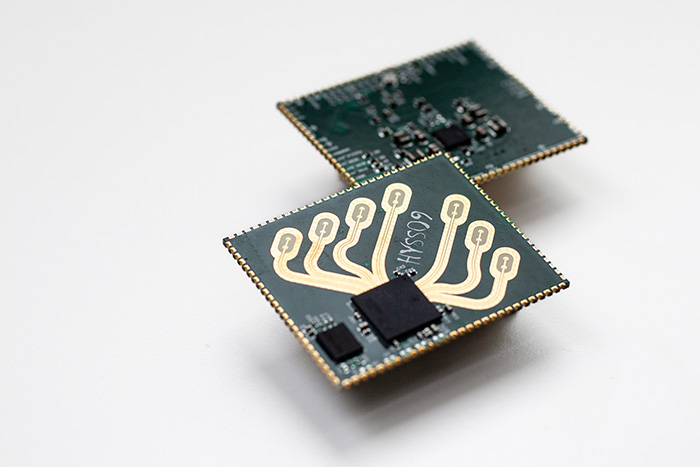
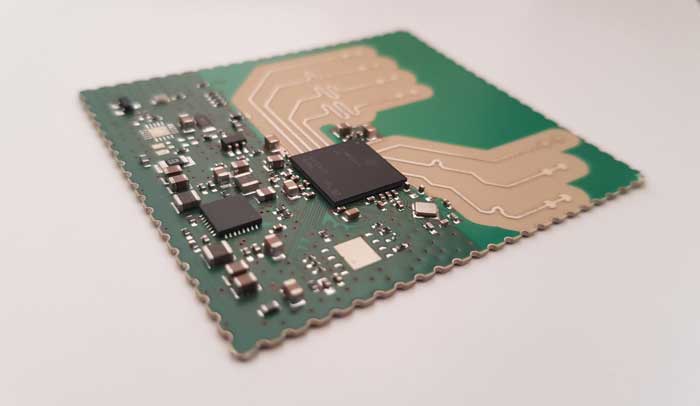
Das Team hat diese beiden Ansätze erfolgreich mit MIMO-Planarantennen, auf PCB mmIC als gegossenes WLP-Gehäuse und Planarantennen auf Glas-Interposern mmIC als Bare Die demonstriert. Als nächstes ist geplant, 3D-Antennen im Formpressverfahren (MID) zu realisieren. Mit 3D-Antennen, bei denen Chip und Antennen übereinandergestapelt werden, lässt sich noch weiter Platz reduzieren. Dies ist vor allem für noch höherfrequente Anwendungen (oberhalb des 79 GHz-Bandes) interessant.
„Uns erreichen zahlreiche Anfragen zum Thema Kompression-Molding und Panel-Level-Packaging. Viele unserer Kontakte sind an Radar-Module mit 3D-Antennen interessiert“, erläutert Tschoban. „Ein zweites Thema, das bei uns immer stärker nachgefragt wird, ist das Einbetten (Embedding).“ Diese Nachfrage wird auch dadurch verstärkt, dass die Anforderungen an Radarsensoren steigen. Gewünscht ist eine Echtzeit-Datenauswertung. Der derzeitige Stand der Technologie ist eine Tabelle mit Angaben zum Abstand zwischen Fahrzeug und Objekt/Person und der Wahrscheinlichkeit, dass sich deren Weg kreuzt.
Am Puls des Marktes: Radaranwendungen der Zukunft
Will man verstehen, warum die Nachfrage nach Radarsystemen und -anwendungen in den letzten Jahren steigt, reicht ein Blick auf die Automobilindustrie. In den 1990er Jahren waren Radar-Anwendungen im Automotive-Bereich der Game Changer. Dieser Industriezweig hat maßgeblich die Entwicklung angestoßen, Radarsensoren kleiner und kostengünstiger zu produzieren, und somit Interesse für weitere kommerzielle und industrielle Anwendungen zu wecken.
Der Preis für Radarsensoren ist in den vergangenen Jahren deutlich gesunken. Hinzu kommt, mit mehr verfügbarer Rechenleistung und durch den Einsatz künstlicher Intelligenz lassen sich Daten heute viel besser und schneller auswerten. „Wir gehen fest davon aus, dass Radarsensoren neben automotiven und industriellen Anwendungen beispielsweise intelligente fahrerlose Transportsysteme (FTS) zukünftig auch verstärkt in kommerziellen Anwendungen wie beispielsweise Home Automation und auch im Medizinbereich zum Einsatz kommen werden“, so lautet die Einschätzung von Tschoban.
„Ein weiterer Pluspunkt aus Sicht der Datenschützer betrachtet ist die Datensparsamkeit von Radarsensoren“, fügt Paul Perlwitz hinzu. „Radar wird zunehmend im Bereich der öffentlichen Sicherheit eingesetzt. Sei es die Überwachung von Parkplätzen, Bahnhöfen oder die Erkennung von Personen in Innenräumen – Radarsensoren ermöglichen das Tracking von Bewegungen sowohl von Objekten als auch von Personen im Raum, ohne dass dies „bildlich“ beobachtet wird.“ Statt eine Unmenge an Bilddaten zu erzeugen, generieren Radarsensoren „Punktwolken“ oder anders formuliert „Zitate“. Diese Art von Daten lässt sich wesentlich einfacher analysieren und weiterverarbeiten als hochauflösende Kamerabilder.
Um auf das Eingangsstatement dieses Beitrages zurückzukommen: Mit dem Verständnis der Anforderungen von Radaranwendungen und durch den Einsatz fortschrittlicher Technologien beim Electronic Packaging und Embedding, die am Fraunhofer IZM stetig vorangetrieben werden, sind Tschoban und Perlwitz tatsächlich auf einem guten Weg, die besten Radarsysteme der Welt entwickeln zu können.
Ausblick…
Das Fraunhofer IZM ist derzeit an der Entwicklung einer verteilten Sensor- und Datenverarbeitungsplattform für radarbasierte 3D-Umgebungserfassung im sicheren autonomen Fahren beteiligt. Im Rahmen des BMBF-Projektes PLATON soll als Sensorprinzip ein 360°-MIMO-FMCW-SAR-Radar zum Einsatz kommen, welches direkt in den Edge-Computing-Modulen integriert ist.
Intelligente fahrerlose Transportsysteme (FTS) ohne Infrastrukturanforderungen oder auch die hochauflösende bildgebende Überwachung von Windkraftanlagen mit Drohnen stellen sehr hohe Anforderungen an die notwendige 3D-Sensorik und KI-basierten Auswertungs- und Steuerungssysteme.
Wer mehr über die Radar-Plattform erfahren möchte und einen persönlichen Fachaustausch mit den Radarexperten des Fraunhofer IZM wünscht, hat im März auf der Embedded World 2023 (Halle 4, Stand 422) und im Mai auf der Sensor-Test 2023 (Halle 1, Stand 1-317) in Nürnberg dazu die Gelegenheit.
Wissenschaftliche Veröffentlichungen
- Development of a PCB-Embedding Technology based-79GHz MIMO Radar Fronted Module for Autonomous Driving, C. Tschoban et al., 2022 IEEE 24th Electronics Packaging Technology Conference (EPTC), Singapore, Singapore, 2022, pp. 40-46
- Development of a 60GHz MIMO Radar Packaging Concept, Tschoban, C., Dilek, S., Ndip, I., Lang, K.-D., Schneider-Ramelow, M. et al., 2021 23rd European Microelectronics and Packaging Conference and Exhibition, EMPC 2021
- Development of a glass technology based 79 GHz MIMO radar front-end module for autonomous driving, Tschoban, C., Rossi, M., Reyes, J., Ndip, I., Lang, K.-D., 2019 IEEE 21st Electronics Packaging Technology Conference, EPTC 2019 9026581, pp. 376-381
- Miniaturized 24 GHz radar positioning transponder module, Fritzsch, T., Tschoban, C., Böttcher, M., Phung, G.N., Lang, K.-D. et al., Smart Systems Integration 2019 – International Conference and Exhibition on Integration Issues of Miniaturized Systems, SSI 2019 pp. 57-64
Das könnte für Sie auch interessant sein:
- A Pedestrian Or Just A Beverage Can? Helping Self-Driving Cars Recognize Objects With Cameras and Radars Combined
- 3D MIMO-Radarmodule für automatisierten Drohnenverkehr
- KI-basierte Radarlösung für sicheres autonomes Fahren
Abonnieren Sie den RealIZM-Newsletter!
Erhalten Sie alle drei Wochen aktuelle Einblicke in innovative Mikroelektronik-Technologien und in die Welt des Electronic-Packaging direkt in Ihr E-Mail-Postfach.
