
Ein 50.000 qm großes künstliches Riff vor der Ostseeküste und eine Grünfläche mitten im Herzen von Berlin auf dem ehemaligen Todesstreifen: zwei Orte – zirka 240 km Luftlinie voneinander entfernt – die unterschiedlicher nicht sein könnten. Beide fungierten vor wenigen Monaten als Testgelände für teilautonome Serviceroboter, die mit einer flexiblen bionischen Sensorhaut ausgestattet waren.
Es ist ein langgehegter Wunschtraum: Serviceroboter sollen das Leben erleichtern und Menschen von gefährlicher Arbeit entlasten. In der Automobilindustrie kommen Roboter seit den 60er Jahren zum Einsatz – vorzugsweise beim Schweißen, Fräsen, Prägen und Lackieren. Das Aufspüren versunkener Munition im Meer beispielsweise ist komplex und gefährlich. Bislang kommen dafür Spezial-U-Boote oder geschulte Profitaucher*innen zum Einsatz.
Unter Beteiligung des Fraunhofer IZM hat ein deutsches Forschungskonsortium im Rahmen des BMBF-geförderten Projekts Bionic RoboSkin von 2019 bis 2022 an zwei konkreten Anwendungen der bionischen Servicerobotik gearbeitet. Projektträger ist der VDI/VDE-IT im Rahmen der Initiative SensoRob. Zum einen sollen robotische Mantas bei der Vermessung von Unterwasserstrukturen z.B. bei der Inspektion von Unterwasser-Pipelines helfen. Zum anderen könnten Roboter-Dachse die teilautonome Geo-Exploration in schwer zugänglichen Bereichen z.B. beim Monitoring im Tunnelbau unterstützen. Voraussetzung für den Robotik-Einsatz in derartig rauen Umgebungsbedingungen sind modulare sensorische Oberflächen.
RealIZM traf sich mit Karl-Friedrich Becker, Gruppenleiter Assembly & Encapsulation, und David Schütze, wissenschaftlicher Mitarbeiter, um einen Einblick in das 3-jährige Forschungsprojekt zu erhalten. Die beiden IZM-Mitarbeiter sprachen mit dem RealIZM-Team über die Weiterentwicklung des Robo-Mantas und des Robo-Dachses, den Projektverlauf und was es konkret bedeutet, Anwendungsforschung zu betreiben.
Elektronik, die unter die Haut geht
„An dem Forschungsprojekt Bionic RoboSkin waren insgesamt sechs Verbundpartner beteiligt. Unser gemeinsames Ziel bestand darin, eine Roboterplattform zu entwickeln, die mittles einer flexiblen bionischen Sensorhaut fähig ist, sich autonom in ihrem jeweiligen Umfeld fortzubewegen“, erläutert Karl-Friedrich Becker, Gruppenleiter Assembly & Encapsulation am Fraunhofer IZM, die Ausgangslage des Projektes. Wichtig ist ihm dabei hervorzuheben, dass die Projektpartner nicht bei null angefangen haben, sondern auf diverse Vorerfahrungen und Vorlagen zugreifen konnten.
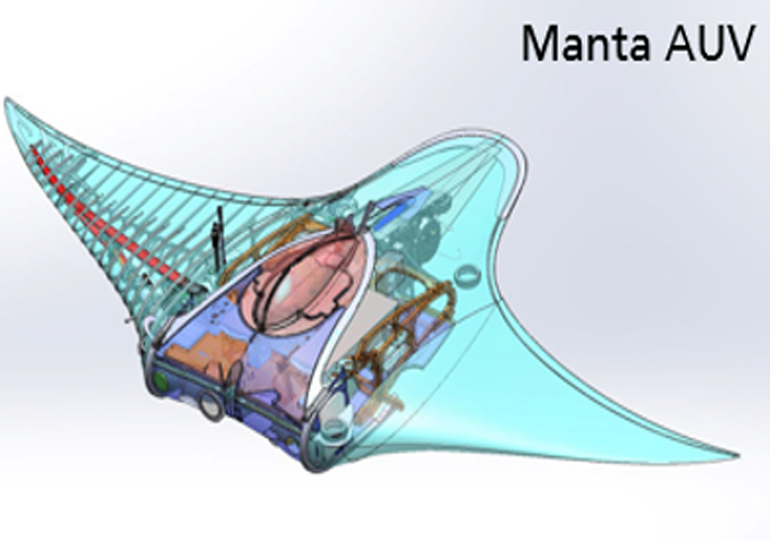
Zentraler Ausgangspunkt war ein bereits existierender vom Manta-Rochen inspirierter bionischer-Roboter (kurz „Manta“) der EvoLogics GmbH, ein auf maritime Technik spezialisiertes Technologieunternehmen. Er verfügte über eine Kamera und ein Sensorik-Modul. Die Brustflossen dienten bisher lediglich der Fortbewegung und Steuerung. Es fehlte ein in-situ Human-Machine-Interface (HMI), um Spezialtaucher*innen bei ihren Einsätzen, wie beispielsweise vor dem Ausbau eines Offshore-Windparks, unterstützen zu können. Im Rahmen des Forschungsprojekts wurden die Flossen mit einem geeigneten HMI sowie komplexen Sensormodulen zur besseren Steuerung des Unterwasserroboters ausgestattet.
Daneben gab es erste Prototypen zur Erweiterung eines Bodenroboters – mit Radar-Antennen ausgestattete Spezialschlitten – die für die Detektion metallischer Strukturen wie beispielsweise Munition in der Erdoberfläche weiterentwickelt wurden.
Das Konzept und der Aufbau für das hochintegrierte Sensormodul, bestehend aus einem Druck- und 9-Achsensensor, einem Chip zur Induktionsauswertung, wenn die Roboter sich über metallische Objekte und Strukturen bewegen, stammt von der Sensorik Bayern GmbH.
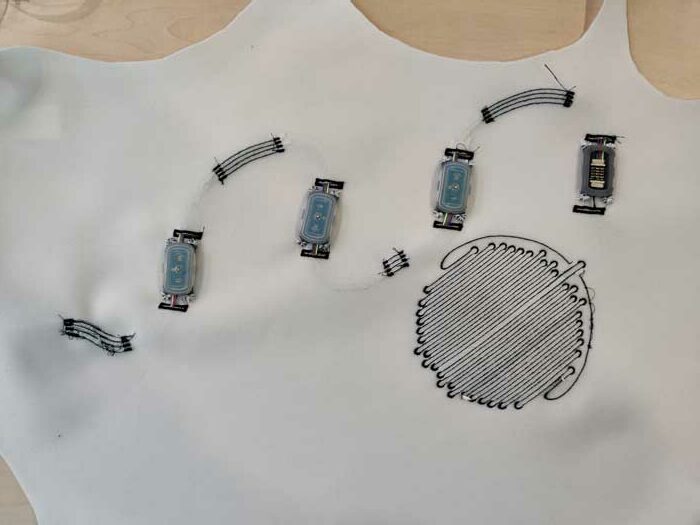
Die Ideenschmiede für Hightech-Textilien, das TITV Greiz, steuerte eine großflächige, flexible textile Sensorhaut bei, die für die Anwendung unter extremen Bedingungen (Salzwasser) geeignet ist. Das Textil dient als Träger für die Sensorelemente und bietet zugleich feuchtigkeitsresistente elektrische Verbindungen für die Energieversorgung und Kommunikation.


Die GEO-DV GmbH, ein Ingenieurbüro für Datenmanagement und Vermessung, war für die Spezifikation der Funktionalität des Robo-Dachses verantwortlich, steuerte zudem Know-how aus verschiedenen geologisch-topografischen Vorprojekten bei und stellte ein Testgelände für die Erprobung des Bodenroboters zur Verfügung.
Embedding des Sensormoduls und Entwicklung des Sensorgehäuses
Die IZM-Wissenschaftler*innen waren für die Systemintegration – die Miniaturisierung und Optimierung der Sensorik – zuständig. Dafür wurde ein Konzept für eine modulare Packaging-Plattform für den Einsatz in einer rauen Meeresumgebung entwickelt. Der Fokus lag dabei auf der Miniaturisierung des Sensormoduls durch Einbettung in eine Leiterplatte und auf der Entwicklung eines Außengehäuses für die Sensorik. „Unser Beitrag bestand darin, hoch robuste und miniaturisierte Sensormodule in die Textilhaut zu integrieren, die sowohl das Erkennen von Berührung und Annäherung als auch das Erkunden der submarinen Umgebung ermöglichen“, fasst Karl-Friedrich Becker die Aufgabenstellung für das IZM-Team zusammen.
„Wir haben uns für einen modularen, zweiteiligen Aufbau entschieden. Der erste Teil unserer Arbeit lag in der maximalen Miniaturisierung der Sensormodule. Dies haben wir durch Einbettung der SMD-Bauteile in eine Leiterplatte erreicht“, erläutert David Schütze. In einem Volumen von nur 23 x 10,5 x 1,6 mm³ sind Mikrocontroller, Treiber und 9-Achsensensor vollständig in einem Glasfaser-Epoxid-Verbund verkapselt.
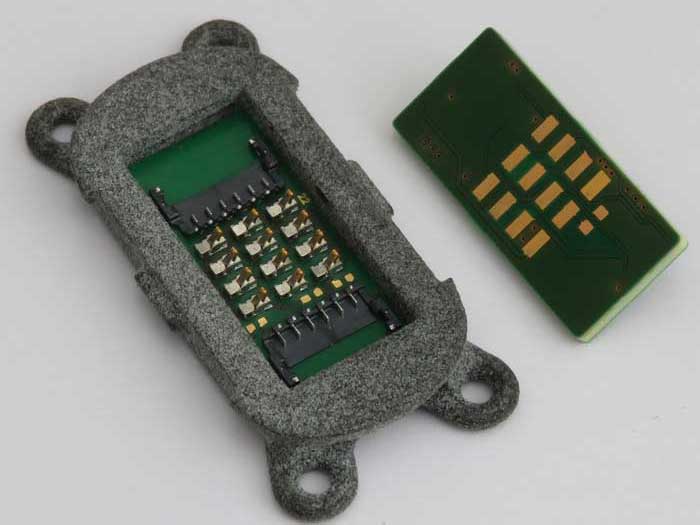


Die Sensorknoten bestehen aus drei Teilen: einem austauschbaren Sensormodul, einer Anschlussplatine und einem mit Fett gefüllten Gehäuse. Bilder: Fraunhofer IZM
Die nächste Herausforderung bestand darin, die Module auf der Textilhaut zu verteilen und in diese zu einem Sensorsystem zu verbinden. Um die Sensor-Module an das textile CAN-Bussystem anschließen zu können und den Aufbau vor Wasser zu schützen, ist ein wasserdichtes robustes Außengehäuse für die Sensorik und die Verbindung zum CAN-Bus erforderlich. Die Verbindungsstelle seitens des CAN-Bus ist eine Platine mit Kontaktflächen, auf die jeweils ein Sensormodul mit elektrischen Federkontakten aufgesetzt wird. Mechanisch werden beide Teile durch das Gehäuse zusammengehalten und geschützt. „Dank der Modularität des Gesamtsystems war es uns jederzeit möglich, bei Bedarf ein Sensormodul ohne großen Aufwand neu zu konfigurieren. In der Entwicklungsphase Anpassungen und Reparaturen vorzunehmen ist nicht ungewöhnlich“, führt Schütze aus.

Bionischer Unterwasserroboter: Extrem wendiger Robo-Manta
„Im Bauch des Mantas befindet sich neben der zentralen Steuerungselektronik ein Lagesensor als Referenz für eine Berechnung des „Lagebildes“. Eine Kamera und unterschiedliche Sensoren zur Erfassung der Umgebungsparameter gehören ebenfalls zur konventionellen Ausstattung“, beschreibt Schütze den Robo-Manta. „Neu hinzugekommen ist, dass das Skelett des Mantas mit einer textilen High-Tech-Haut überzogen wurde. Auf deren Oberfläche befinden sich nun robuste höchstintegrierte Sensormodule.“
Die Brustflossen des Robo-Mantas sind mit jeweils neun Sensormodulen ausgestattet. Die Sensoren erfassen die Umgebungsdruck-Temperatur und Modul-Temperatur. Zudem verfügen sie über je einen Lagesensor, der jeweils in alle Raumrichtungen Beschleunigung, Drehmoment und Magnetfeld misst. Mithilfe dieser lässt sich relativ zum zentralen Lagesensor die jeweilige Position berechnen und somit eine genaue Vermessung der Flügelbewegung im Wasser durchführen.
Diese Daten können sowohl für die Optimierung der Steuerung des Robo-Mantas eingesetzt werden, als auch Rückschlüsse auf die tatsächlichen Strömungsverhältnisse liefern. „Wenn man vergleicht, wie sich der Manta eigentlich bewegen müsste und wie er sich tatsächlich unter Wasser fortbewegt, können wir die Bewegung iterativ optimieren und effizienter gestalten. Wir können sein Bewegungsmuster an die lokalen Strömungsverhältnisse anpassen. Soll der Unterwasserroboter nach links schwimmen und die Strömung treibt ihn bereits in die linke Richtung, kann dafür weniger Kraft aufgewendet werden.“
„Das Team der Sensorik Bayern GmbH hat ein Flossen-Modell erstellt. Vereinfacht gesagt, handelt es sich um ein flexibles Brett mit Sensormodulen. Anhand dieses analogen Demonstrators hat das Regensburger Team ein digitales dreidimensionales Echtzeit-Modell der Flosse entwickelt, das die aktuelle Flossenstellung und -form liefert“, führt Becker auf die Nachfrage aus, woher die IZM-Wissenschaftler*innen wussten, wo genau die idealen Positionen für die Anbringung der Sensorik sind. Mit Hilfe des digitalen Zwillings konnten die Sensormodule optimal auf den Flossenflächen platziert werden.
Auf der Oberseite der Flossen sind Touchpads angebracht, mit deren Hilfe Taucher*innen mit dem Unterwasserroboter direkt kommunizieren können (HMI). Auf der Unterseite der Flossen, die eine Spannweite von insgesamt zwei Metern haben, sind induktive Spulen angebracht, die unter Wasser metallische Strukturen erkennen. „Dank der flexiblen Sensorhaut sind zahlreiche Anwendungsszenarien, beispielsweise unter Wasser Versorgungsleitungen und versunkene hochexplosive Munitionsreste beim Auf- und Ausbau von Offshore-Windparks zu detektieren – und auch die Steuerungsverbesserung des Roboters möglich“, erzählt Becker begeistert.
Lieber gemeinsam als einsam: Ein Schwarm an Robo-Mantas
Derzeit kann der Robo-Manta bis zu zirka 50 Meter tief tauchen und dort ein Bodenprofil aufzeichnen. „Je dichter der Manta über die Bodenoberfläche fliegt, umso besser. Um Risiken zu vermeiden, sind Visualisierungen wichtig. Dies geht aufgrund der zunehmenden Dunkelheit unter Wasser nur in moderaten Tiefen. Der Roboter ist daher mit einer High Power-LED ausgestattet, um visuelles Feedback zu Sensorevents erfassen zu können“, beschreibt Becker die derzeitigen Schwimmfähigkeiten des Robo-Mantas.
Zur Unterstützung ist zudem immer ein Taucher dabei, der steuernd eingreifen kann. Für den Fall, dass der Manta zurückgeholt oder umgeleitet werden muss, kommuniziert der Taucher mit Hilfe der Touchpads, die sich auf der Oberseite der Flossen befinden, mit dem Roboter. „Im Projekt konnten wir sehr gute Erfahrungen sammeln, wie das Sensorikgehäuse für Tauchtiefen bis zu 20 Metern gestaltet sein muss.“
Bei dem Testlauf im künstlichen Riff Nienhagen wurde gemeinsam mit der BALTIC Taucherei- und Bergungsbetrieb Rostock GmbH erfolgreich demonstriert, dass der Robo-Manta taucht, eine Strecke geradeaus schwimmt, dann umdreht und zurückkommt. Mit Hilfe eines GPS- oder Entfernungs-Sensors lässt sich die zurückgelegte Strecke nachvollziehen und in eine digitale Landkarte – ein sogenanntes Geoinformationssystem (GIS) – einbauen. Auf Basis dieser Informationen wird der Serviceroboter erneut losgeschickt, um das Gelände abzurastern. Der nächste Schritt ist, diese Vorarbeiten auf einen Schwarm zu übertragen.
„Die Idee ist, dass ein programmierter Schwarm von autonom schwimmenden Robo-Manta das Profil des Meeresgrundes abrastert“, erläutert Schütze die zukünftige Vision. „Mit dem Bionic RoboSkin-Projekt haben wir die Grundlagen für die autonome Exploration von kooperativen Servicerobotern mit Tauchern geschaffen.“
Archäologie ohne Bagger und Spaten: Bodenroboter
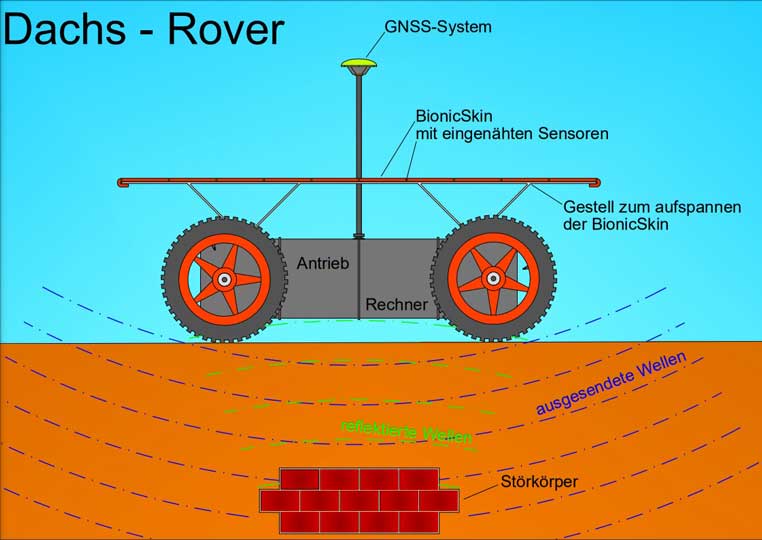
Der Robo-Manta hat einen Gefährten, der ebenfalls ein tierisches Vorbild hat. Die Forschenden haben die Sensorplattform des Mantas auf einen Bodenroboter – einen Robo-Dachs – übertragen. Dieser wird ebenfalls durch GPS-Systeme gesteuert und ist mit Induktionssensoren sowie optional mit einem von Sensorik Bayern entwickelten Ground-Penetrating-Radar ausgestattet, um unterirdische Metallstrukturen zu detektieren und Landvermessungen wie teilautonome Geo-Exploration in schwer zugänglichen Bereichen beispielsweise zur Überwachung von Bodenbewegungen im Tunnelbau durchzuführen.


„Zugegeben der Robo-Dachs gewinnt keine Herzen. Er ist leider nicht so niedlich wie der Robo-Manta“, erläutert Becker die nicht vorhandene Ähnlichkeit des Roboters mit seinem tierischen Namensgeber. Der Robo-Dachs ist ein 6-rädriger Roboter, der sich rollend fortbewegt. Das Hinterteil besteht aus einer flügelartigen Holzkonstruktion, über die eine zwei Meter breite Textilfläche aufgespannt ist. Die Textilhaut des Dachses ist mit induktiven Spulen und einem GPS-Sensor ausgestattet. Über Funk werden die Daten an ein Tablet weitergeleitet, das zugleich als Steuereinheit dient. „Die metallarme Konstruktion des Bodenroboters ist wichtig, weil wir mit induktiver Sensorik metallische Strukturen, die sich unter der Oberfläche verbergen, erkennen wollen. Eine Metallkonstruktion würde die Sensordaten nur stören“, so Becker.
Den Konzeptnachweis hat der Robo-Dachs auf mehreren Messfahrten auf dem ehemaligen Todesstreifen in der Bernauer Straße in Berlin-Mitte und auf dem Testgelände der GEO-DV GmbH erfolgreich geliefert. „Der Dachs verrät uns, ob sich auf dem untersuchten Gebiet Metall, Rohre, Fundamente und Strukturen befinden. Er gibt einen Einblick in die jüngere Geschichte des Grundstückes: Stand hier in den 30-iger bis 60-iger Jahren schon mal ein Haus? Gibt es möglicherweise noch Überreste von Tiefbauten? Quasi Archäologie ohne Buddeln.“
Es kommt nicht selten vor, dass zu einer grünen Wiese die bauliche Dokumentation fehlt. Bauherren stehen dann auf einer Terra incognita. Um die Kosten und Erschließungsarbeiten eines Grundstückes planen zu können, sind Probegrabungen notwendig. Je präziser diese stattfinden können, umso besser. Der Einsatz von Bauingenieuren und auch Archäologen kostet Zeit und Geld.
Eine explorative und nicht-invasive Voruntersuchung des Geländes mit Hilfe des Robo-Dachses gibt erste Rückschlüsse auf die Bodenbeschaffenheit bis zu einer Tiefe von 50 cm und liefert Anhaltspunkte für Testgrabungen. „Um in tiefere Bodenschichten vorzudringen, wurden Testfahrten mit dem entwickelten Ground-Penetrating-Radar durchgeführt“, ergänzt Schütze.
Ausblick: Robo-Kalmare für den Einsatz in der Tiefsee
Das Forschungsprojekt RoboSkin wurde Ende 2022 abgeschlossen. Weiterführende Arbeiten sind bereits angelaufen. So wird im Rahmen des Verbundprojektes DeepSea Protection ein multisensorisches Monitoringsystem für den produktionsbezogenen Umweltschutz im Tiefseebergbau entwickelt.
Zu den Forschungszielen gehören eine druckneutrale Verkapselung, hochrobuste Dichtungsschichten und die Integration eines Feuchtigkeitssensors im Inneren der Gehäuse zur Überwachung des Eindringens von Feuchtigkeit. Das Sensorsystem soll die operative Erfassung und feinräumige Verifizierung geologischer und topographischer Daten ermöglichen. Zudem soll es detaillierte Analysen der Rohstoffverteilung und eine aktuelle Betrachtung der Tiefseeökologie in einer Tiefe von 3.000 bis 6.000 Metern liefern. Geplant ist, ein Demonstrator-System bestehend aus vier mobilen Bodenstationen (Tiefsee-Kalmare) und zwei autonomen bionischen Tauchfahrzeugen aufzubauen.
Vielen Dank an Evologics GmbH, Sensorik Bayern GmbH, GEO-DV GmbH und TITV Greiz für die Bereitstellung der Bilder und Videos.
Das könnte für Sie auch interessant sein:
Abonnieren Sie den RealIZM-Newsletter!
Erhalten Sie alle drei Wochen aktuelle Einblicke in innovative Mikroelektronik-Technologien und in die Welt des Electronic-Packaging direkt in Ihr E-Mail-Postfach.
